Of the various types of information - words, pictures, and connections between things - relationships are especially interesting. Relationships show how things interact and create networks. But not all ways of representing relationships are the same. In machine learning, how we do vector representation of things and their relationships affects performance on a wide range of tasks.
Below, we evaluate several approaches to vector representation on a real-life use case: how well each approach classifies academic articles in a subset of the Cora citation network.
We look first at Bag-of-Words (BoW), a standard approach to vectorizing text data in ML. Because BoW can't represent the network structure well, we turn to solutions that can help BoW's performance: Node2Vec and GraphSAGE. We also look for a solution to BoW's other shortcoming - its inability to capture semantic meaning. We evaluate LLM embeddings, first on their own, then combined with Node2Vec, and, finally, GraphSAGE trained on LLM features.
Our use case is a subset of the Cora citation network. This subset comprises 2708 scientific papers (nodes) and connections that indicate citations between them. Each paper has a BoW descriptor containing 1433 words. The papers in the dataset are also divided into 7 different topics (classes). Each paper belongs to exactly one of them.
We load the dataset as follows:
from torch_geometric.datasets import Planetoid ds = Planetoid("./data", "Cora")[0]
We can evaluate how well the BoW descriptors represent the articles by measuring classification performance (Accuracy and macro F1). We use a KNN (K-Nearest Neighbors) classifier with 15 neighbors, and cosine similarity as the similarity metric:
from sklearn.neighbors import KNeighborsClassifier from sklearn.model_selection import train_test_split from sklearn.metrics import f1_score def evaluate(x,y): x_train, x_test, y_train, y_test = train_test_split(x, y, random_state=42) model = KNeighborsClassifier(n_neighbors=15, metric="cosine") model.fit(x_train, y_train) y_pred = model.predict(x_test) print("Accuracy", f1_score(y_test, y_pred, average="micro")) print("F1 macro", f1_score(y_test, y_pred, average="macro"))
Let's see how well the BoW representations solve the classification problem:
evaluate(ds.x, ds.y) >>> Accuracy 0.738 >>> F1 macro 0.701
BoW's accuracy and F1 macro scores are pretty good, but leave significant room for improvement. BoW falls short of correctly classifying papers more than 25% of the time. And on average across classes BoW is inaccurate nearly 30% of the time.
Can we improve on this? Our citation dataset contains not only text data but also relationship data - a citation graph. Any given article will tend to cite other articles that belong to the same topic that it belongs to. Therefore, representations that embed not just textual data but also citation data will probably classify articles more accurately.
BoW features represent text data. But how well does BoW capture the relationships between articles?
That is, do BoW features represent citation graph data?
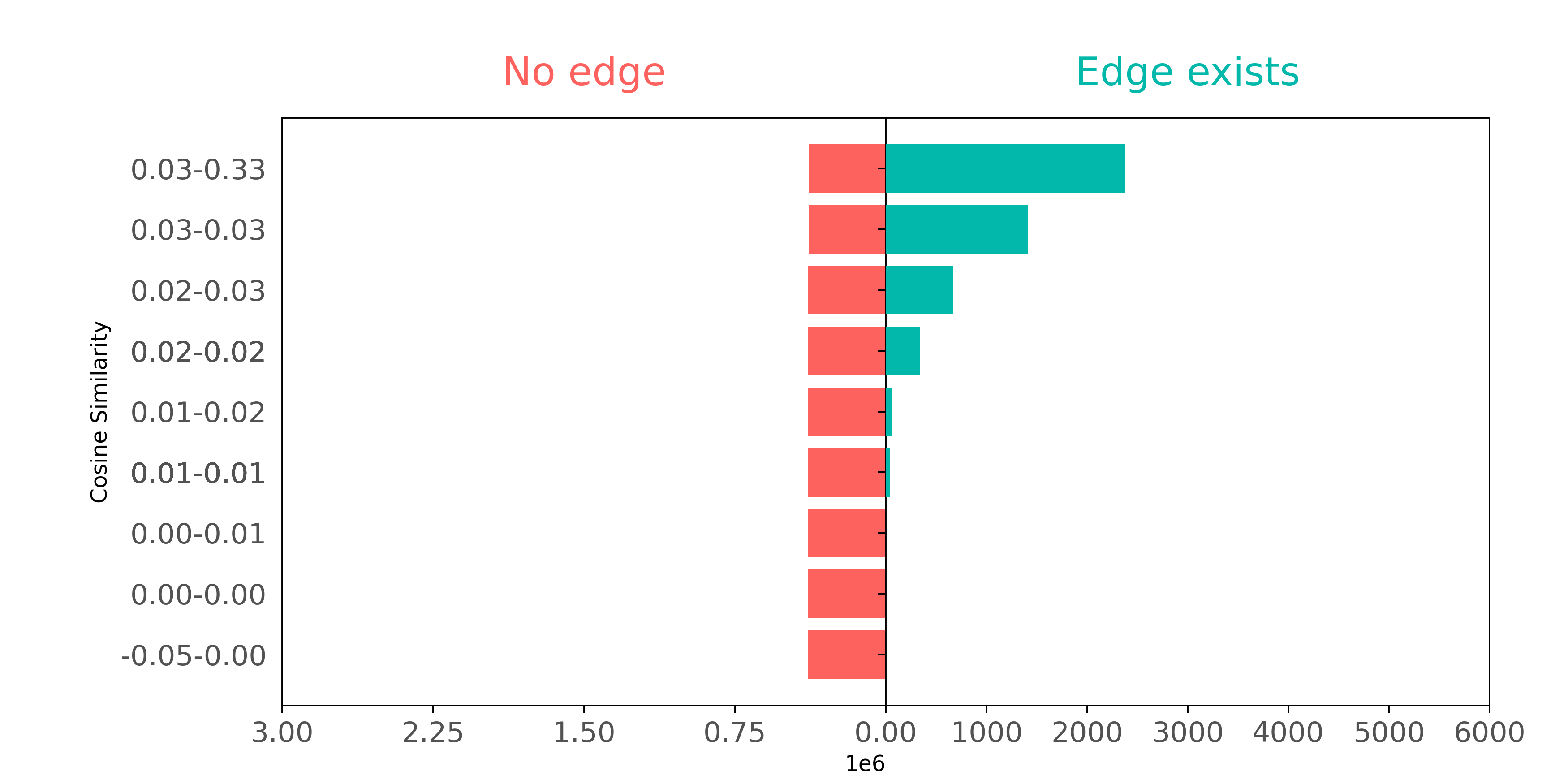
To examine how well citation pairs show up in BoW features, we can make a plot comparing connected and not connected pairs of papers based on how similar their respective BoW features are.
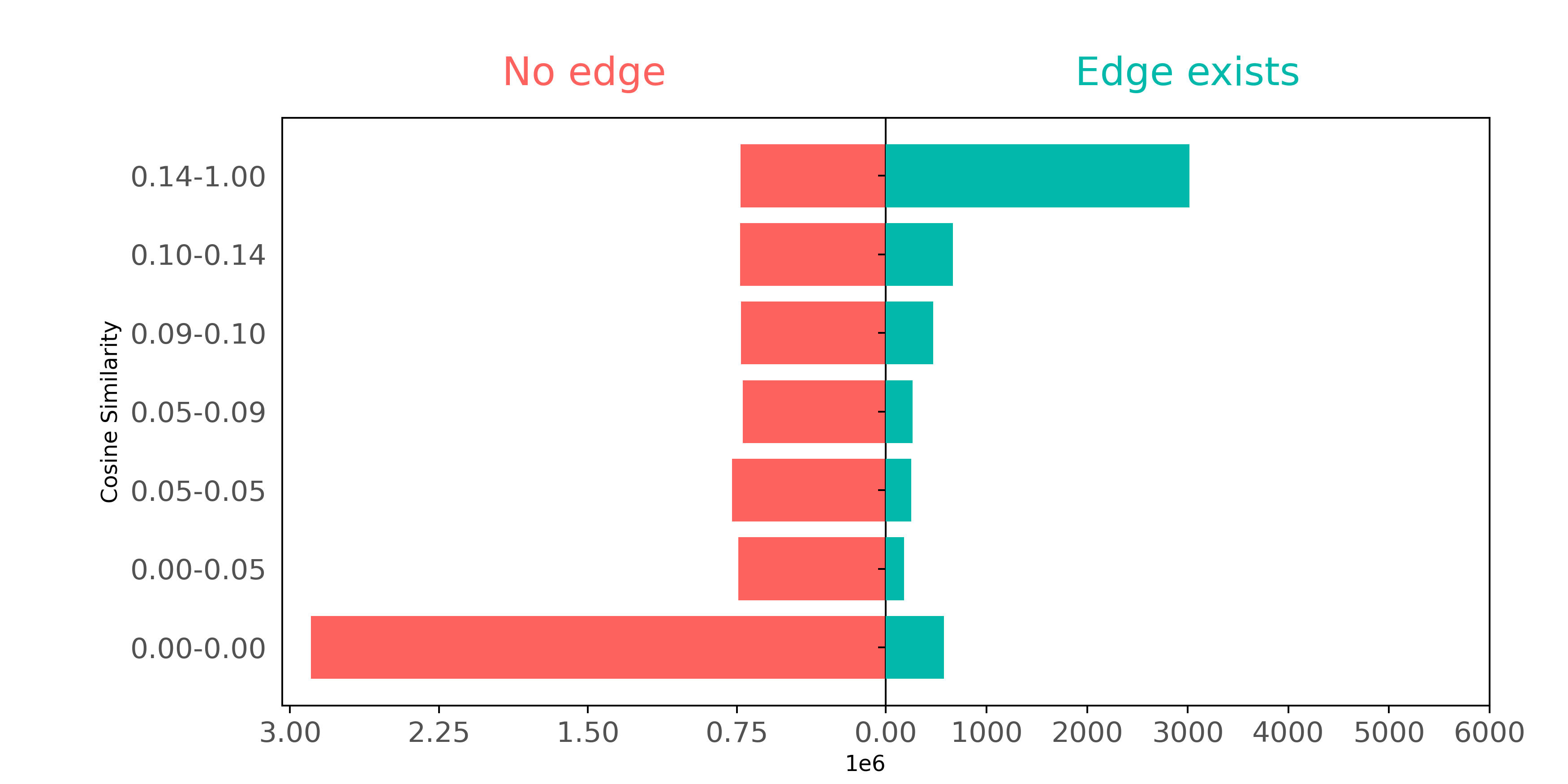
In this plot, we define groups (shown on the y-axis) so that each group has about the same number of pairs as the other groups. The only exception is the 0.00-0.05 group, where lots of pairs have no similar words - they can't be split into smaller groups.
The plot demonstrates how connected nodes usually have higher cosine similarities. Papers that cite each other often use similar words. But if we ignore paper pairs with zero similarities (the 0.00-0.00 group), papers that have not cited each other also seem to have a wide range of common words.
Though BoW representations embody some information about article connectivity, BoW features don't contain enough citation pair information to accurately reconstruct the actual citation graph. BoW looks exclusively at word co-occurrence between article pairs, and therefore misses word context data contained in the network structure.
Can we make up for BoW's inability to represent the citation network's structure? Are there methods that capture node connectivity data better?
Node2Vec is built to do precisely this, for static networks. So is GraphSAGE, for dynamic ones. Let's look at Node2Vec first.
As opposed to BoW vectors, node embeddings are vector representations that capture the structural role and properties of nodes in a network. Node2Vec is an algorithm that learns node representations using the Skip-Gram method; it models the conditional probability of encountering a context node given a source node in node sequences (random walks):
Here, and are the embeddings of the context node and source node respectively. The variable serves as a normalization constant, which, for computational efficiency, is never explicitly computed.
The embeddings are learned by maximizing the co-occurence probability for (source,context) pairs drawn from the true data distribution (positive pairs), and at the same time minimizing for pairs drawn from a synthetic noise distribution. This process ensures that the embedding vectors of similar nodes are close in the embedding space, while dissimilar nodes are further apart (with respect to the dot product).
The random walks are sampled according to a policy, which is guided by 2 parameters: return , and in-out .
These parameters are particularly useful for accommodating different networks and tasks. Adjusting the values of and captures different characteristics of the graph in the sampled walks. BFS-like exploration is useful for learning local patterns. On the other hand, using DFS-like sampling is useful for capturing patterns on a bigger scale, like structural roles.
In our example, we use the torch_geometric implementation of the Node2Vec algorithm. We initialize the model by specifying the following attributes:
edge_index: a tensor containing the graph's edges in an edge list format.embedding_dim: specifies the dimensionality of the embedding vectors.By default, the p and q parameters are set to 1, resulting in ordinary random walks. For additional configuration of the model, please refer to the model documentation.
from torch_geometric.nn import Node2Vec device="cuda" n2v = Node2Vec( edge_index=ds.edge_index, embedding_dim=128, walk_length=20, context_size=10, sparse=True ).to(device)
The next steps include initializing the data loader and the optimizer.
The role of the data loader is to generate training batches. In our case, it will sample the random walks, create skip-gram pairs, and generate corrupted pairs by replacing either the head or tail of the edge from the noise distribution.
The optimizer is used to update the model weights to minimize the loss. In our case, we are using the sparse variant of the Adam optimizer.
loader = n2v.loader(batch_size=128, shuffle=True, num_workers=4) optimizer = torch.optim.SparseAdam(n2v.parameters(), lr=0.01)
In the code block below, we conduct the actual model training: We iterate over the training batches, calculate the loss, and apply gradient steps.
n2v.train() for epoch in range(200): total_loss = 0 for pos_rw, neg_rw in loader: optimizer.zero_grad() loss = n2v.loss(pos_rw.to(device), neg_rw.to(device)) loss.backward() optimizer.step() total_loss += loss.item() print(f'Epoch: {epoch:03d}, Loss: {total_loss / len(loader):.4f}')
Finally, now that we have a fully trained model, we can evaluate the learned embeddings on our classification task, using the evaluate function we defined earlier.
embeddings = n2v().detach().cpu() # Access node embeddings evaluate(embeddings, ds.y) >>> Accuracy: 0.822 >>> F1 macro: 0.803
Using Node2Vec embeddings, we get better classification results than when we used BoW representations.
Let's also see if Node2Vec does a better job of representing citation data than BoW. We'll examine - as we did with BoW above - whether connected nodes separate from not connected node pairs when comparing on cosine similarity.
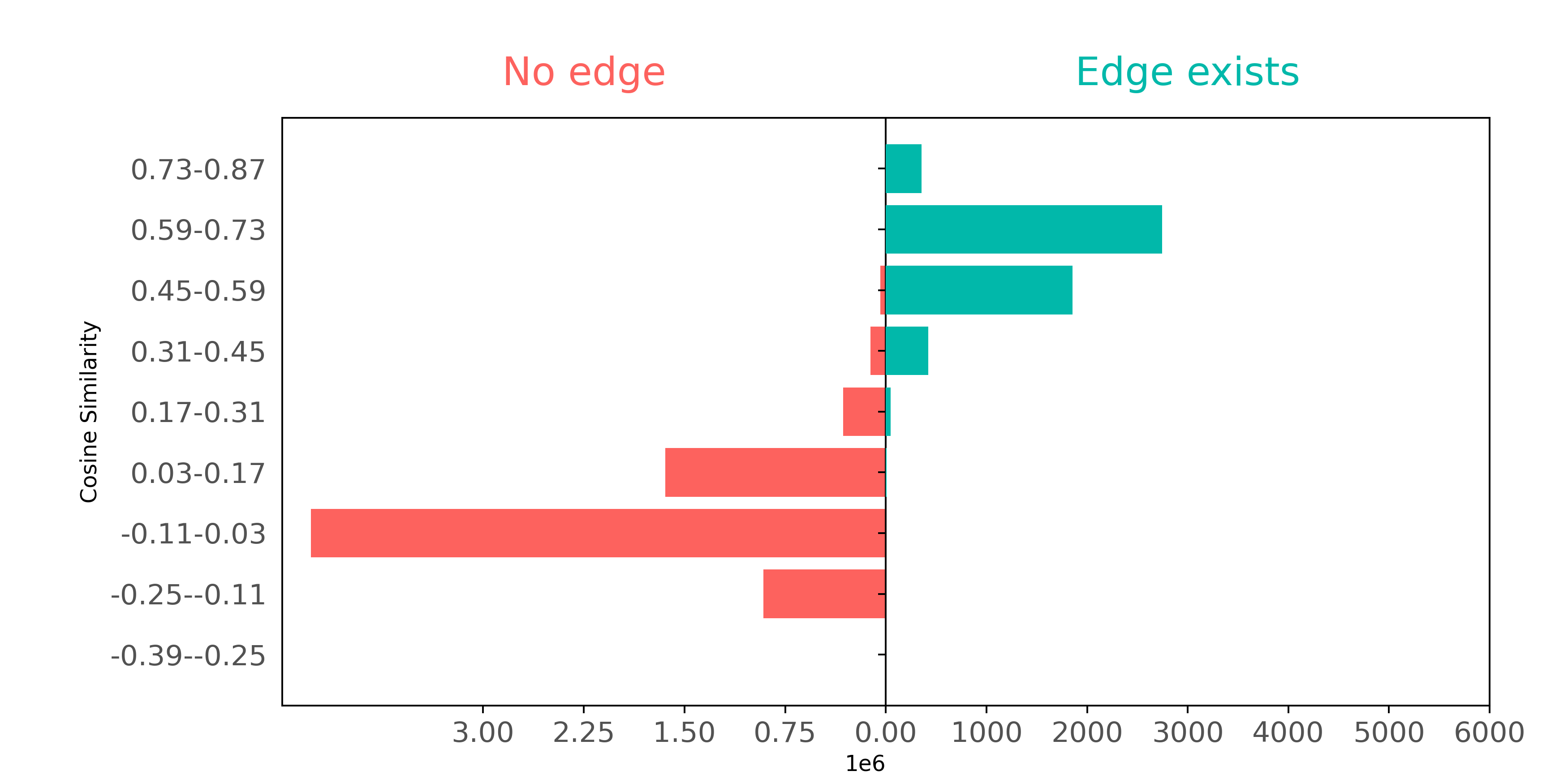
Using Node2Vec, we can see a well defined separation; these embeddings capture the connectivity of the graph much better than BoW did.
But can we further improve classification performance? What if we combine the two information sources - relationship (Node2Vec) embeddings and textual (BoW) features?
A straightforward approach for combining vectors from different sources is to concatenate them dimension-wise. We have BoW features v_bow and Node2Vec embeddings v_n2v. The fused representation would be v_fused = torch.cat((v_n2v, v_bow), dim=1). But before combining them, we should examine their respective L2 norm distributions side by side, to ensure that one kind of representations will not dominate the other:
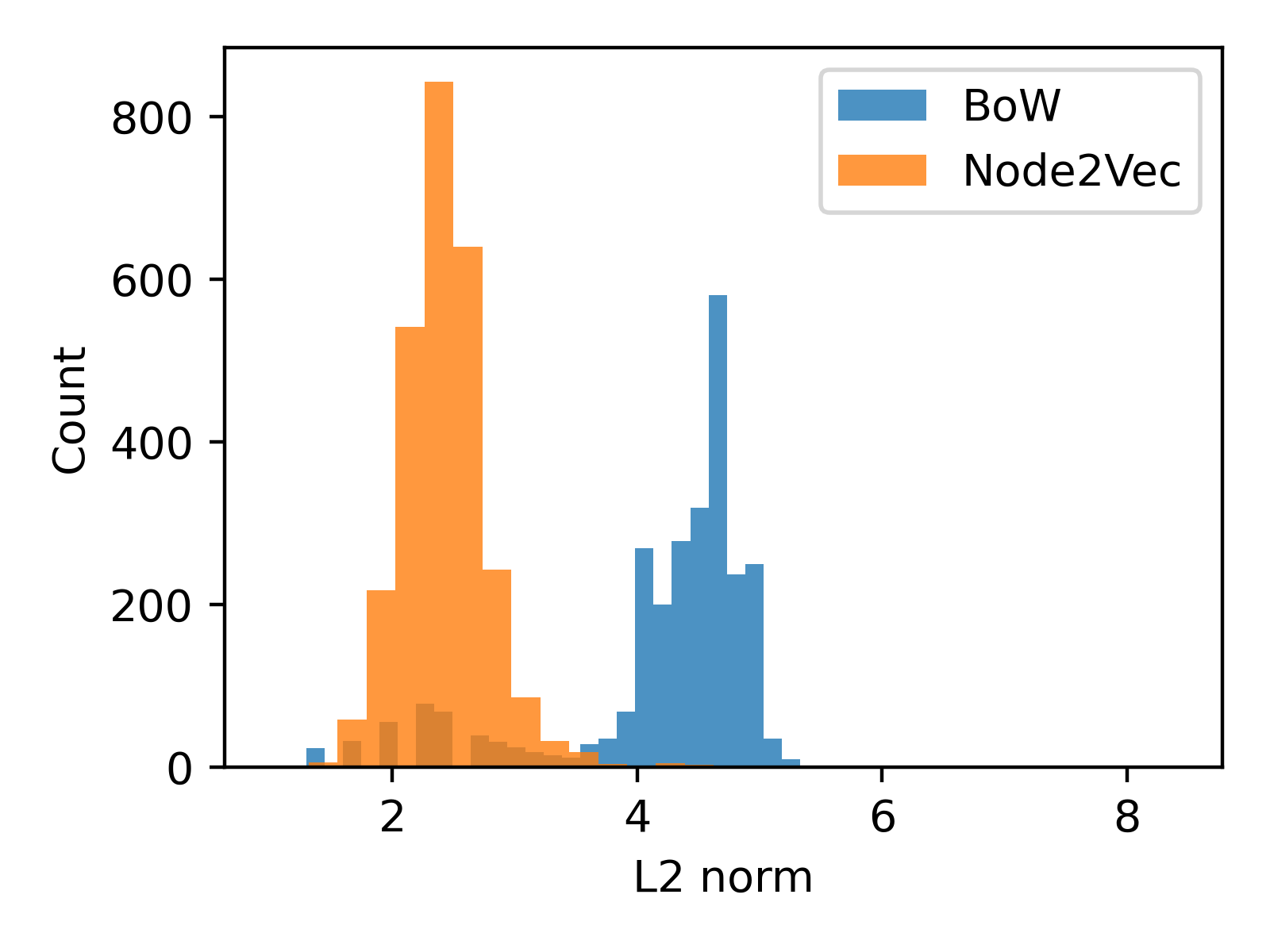
From the plot above, it's clear that the scales of the embedding vector lengths differ. To avoid the larger magnitude Node2Vec vector overshadowing the BoW vector, we can divide each embedding vector by their average length.
But we can further optimize performance by introducing a weighting factor (). The combined representations are constructed as x = torch.cat((alpha * v_n2v, v_bow), dim=1). To determine the appropriate value for , we employ a 1D grid search approach. Our results are displayed in the following plot.
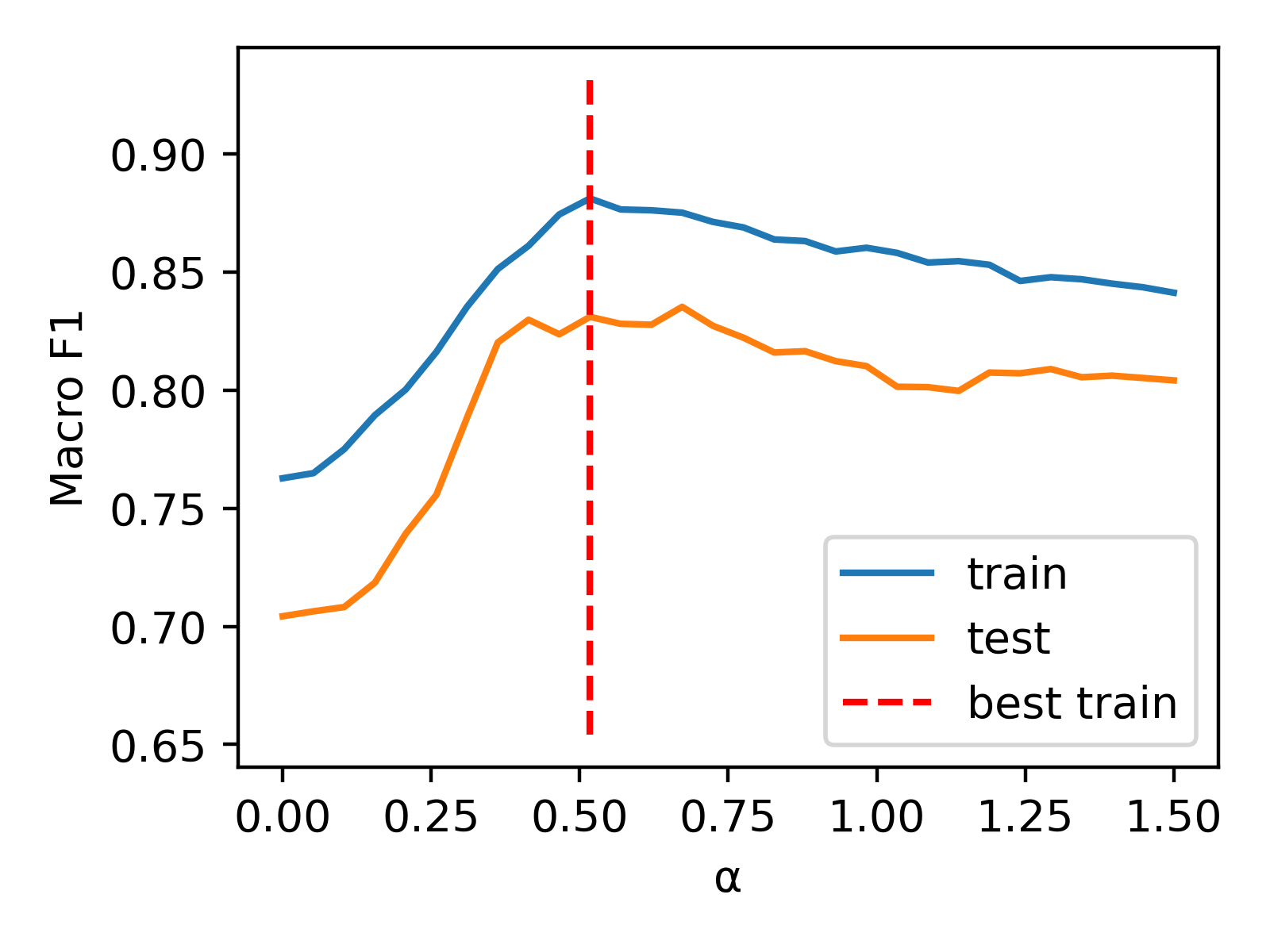
Now, we can evaluate the combined representation using the alpha value that we've obtained (0.517).
v_n2v = normalize(n2v().detach().cpu()) v_bow = normalize(ds.x) x = np.concatenate((best_alpha*v_n2v,v_bow), axis=1) evaluate(x, ds.y) >>> Accuracy 0.852 >>> F1 macro 0.831
By combining representations of the network structure (Node2Vec) and text (BoW) of the articles, we're able to significantly improve performance on article classification. Relatively, the Node2Vec + BoW fusion performed 3% better than the Node2Vec-only, and 11.4% better the BoW-only classifiers.
These are impressive results. But what if our citation network grows? What happens when new papers need to be classified?
In cases where new data is introduced to our dataset, BoW is very useful, because it can be generated easily. Node2Vec, on the other hand, is unable to generate embeddings for entities not present during its training phase. To represent new data with Node2Vec features, you have to retrain the entire model. This means that while Node2Vec is a robust and powerful tool for representing static networks, it is inconvenient and less effective at trying to represent dynamic networks.
For dynamic networks, where entities evolve or new ones emerge, there are other, inductive approaches - like GraphSAGE.
GraphSAGE is an inductive representation learning algorithm that leverages GNNs (Graph Neural Networks) to create node embeddings. Instead of learning static node embeddings for each node, it learns an aggregation function on node features that outputs node representations. Because this model combines node features with network structure, we don't have to manually combine the two information sources later on.
The GraphSAGE layer is defined as follows:
Here is a nonlinear activation function, is a learnable parameter of layer , and is the set of nodes neighboring node . As in traditional Neural Networks, we can stack multiple GNN layers. The resulting multi-layer GNN will have a wider receptive field. That is, it will be able to consider information from bigger distances, thanks to recursive neighborhood aggregation.
To learn the model parameters, the GraphSAGE authors suggest two approaches:
It's also possible to combine the two approaches by using a linear combination of the two loss functions. But in this example we stick with the unsupervised variant.
Here, just as we did when training the Node2Vec model, we use torch_geometric to implement the GraphSAGE algorithm.
First, we create the model by initializing a GraphSAGE object. We are using a 1-layer GNN, meaning that our model will receive node features from a distance of at most 1. We will have 256 hidden and 128 output dimensions.
from torch_geometric.nn import GraphSAGE sage = GraphSAGE( ds.num_node_features, hidden_channels=256, out_channels=128, num_layers=1 ).to(device)
The optimizer is constructed in the usual PyTorch fashion. Once again, we'll use Adam:
optimizer = torch.optim.Adam(sage.parameters(), lr=0.01)
Next, we construct the data loader. This will generate training batches for us. We're aiming at an unsupervised approach, so the loader will:
neg_sampling_ratio parameter, which we set to 1. This means that for each positive sample we'll have exactly one negative sample, for use in training.num_neighbors parameter allows us to specify the number of sampled neighbors at each depth. This is particuarly useful when we are dealing with dense graphs and/or multi layer GNNs. Limiting the considered neighbors will decouple computational complexity from the actual node degree. However, in our particular case, we set the number to -1 indicating that we want to sample all of the neighbors.from torch_geometric.loader import LinkNeighborLoader loader = LinkNeighborLoader( ds, batch_size=1024, shuffle=True, neg_sampling_ratio=1.0, num_neighbors=[-1], transform=T.NormalizeFeatures(), num_workers=4 )
Here, we can see what a batch returned by the loader actually looks like:
print(next(iter(loader))) >>> Data(x=[2646, 1433], edge_index=[2, 8642], edge_label_index=[2, 2048], edge_label=[2048], ...)
In the Data object, x contains the BoW node features. The edge_label_index tensor contains the head and tail node indices for the positive and negative samples. edge_label is the binary target for these pairs (1 for positive 0 for negative samples). The edge_index tensor holds the adjacency list for the current batch of nodes.
Now we can train our model as follows:
def train(): sage.train() total_loss = 0 for batch in loader: batch = batch.to(device) optimizer.zero_grad() # create node representations h = sage(batch.x, batch.edge_index) # take head and tail representations h_src = h[batch.edge_label_index[0]] h_dst = h[batch.edge_label_index[1]] # compute pairwise edge scores pred = (h_src * h_dst).sum(dim=-1) # apply cross entropy loss = F.binary_cross_entropy_with_logits(pred, batch.edge_label) loss.backward() optimizer.step() total_loss += float(loss) * pred.size(0) return total_loss / ds.num_nodes for epoch in range(100): loss = train() print(f'Epoch: {epoch:03d}, Loss: {loss:.4f}')
Next, we can embed nodes and evaluate the embeddings on the classification task:
embeddings = sage(normalize(ds.x), ds.edge_index).detach().cpu() evaluate(embeddings, ds.y) >>> Accuracy 0.844 >>> F1 macro 0.820
The results are only slightly worse than the results we got by combining Node2Vec with BoW features. But, remember, we're evaluating GraphSAGE because it can handle dynamic network data, whereas Node2Vec cannot. GraphSAGE embeddings perform well on our classification task and are able to embed completely new nodes as well. When your use case involves new nodes or nodes that evolve, an inductive model like GraphSAGE may be a better choice than Node2Vec.
In addition to not being able to represent network structure, BoW vectors, because they treat words as contextless occurrences, can't capture semantic meaning, and therefore don't perform as well on classification tasks as approaches that can do semantic embedding. Let's summarize the classification performance results we obtained above using BoW features.
| Metric | BoW | Node2Vec | Node2Vec+BoW | GraphSAGE(BoW-trained) |
|---|---|---|---|---|
| Accuracy | 0.738 | 0.822 | 0.852 | 0.844 |
| F1 (macro) | 0.701 | 0.803 | 0.831 | 0.820 |
These article classification results can be improved further using LLM embeddings, because LLM embeddings excel in capturing semantic meaning.
To do this, we use the all-mpnet-base-v2 model available on Hugging Face for embedding the title and abstract of each paper. Data loading and optimization is done in exactly the same way we did in the code snippets above, when we used BoW features. This time, we just substitute LLM features where the BoW features were.
The results obtained with LLM only, Node2Vec combined with LLM, and GraphSAGE trained on LLM appear in the following table, along with the relative percent improvement compared to using the BoW features:
| Metric | LLM | Node2Vec+LLM | GraphSAGE(LLM-trained) |
|---|---|---|---|
| Accuracy | 0.816 (+7.8%) | 0.867 (+1.5%) | 0.852 (+0.8%) |
| F1 (macro) | 0.779 (+7.8%) | 0.840 (+0.9%) | 0.831 (+1.1%) |
Let's also see how well LLM vectors represent citation data, again plotting connected and not connected pairs in terms of cosine similarity. How well do citation pairs show up in LLM vectors compared with BoW and Node2Vec?
In LLM embeddings, positive (connected) citation pairs have higher cosine similarity values relative to all pairs, thus representing an improvement over BoW features in identifying positive pairs. However, negative (unconnected) pairs in LLM embeddings have a wide range of cosine similarity scores, making it difficult to distinguish connected from unconnected pairs. While LLM embeddings do better over all than BoW features at capturing the citation graph structure, they do not do as well as Node2Vec.
For classification tasks on our article citation dataset, we can conclude that:
As a final note, we've included a pro vs con comparison of our two node representation learning algorithms - Node2Vec and GraphSAGE, to help with thinking about which model might be a better fit for your use case:
| Aspect | Node2Vec | GraphSAGE |
|---|---|---|
| Generalizing to new nodes | no | yes |
| Inference time | constant | we can control inference time |
| Accommodating different graph types and objectives | by setting and parameters, we can adapt representations to fit our needs | limited control |
| Combining with other representations | concatenation | by design, the model learns to map node features to embeddings |
| Dependency on additional representations | relies solely on graph data | depends on quality and availability of node representations; impacts model performance if lacking |
| Embedding flexibility | very flexible node representations | representations of nodes with similar neighborhoods can't have much variation |
Stay updated with VectorHub
Continue Reading